|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ЕНЦИКЛОПЕДІЯ РАДІОЕЛЕКТРОНІКИ ТА ЕЛЕКТРОТЕХНІКИ Влаштування дистанційного контролю справності п'єзоелектричних датчиків
Енциклопедія радіоелектроніки та електротехніки / Охоронні пристрої та сигналізація об'єктів Небезпека наслідків аварії змушує пред'являти підвищені вимоги до надійності вимірювального каналу та, насамперед, датчика, оскільки він експлуатується у найважчих умовах, що існують на даному об'єкті. Виникає необхідність контролю його властивостей як засоби вимірювання частіше, ніж це робиться за періодичних (зазвичай один раз на рік) перевірок. Оскільки датчик встановлений у важкодоступному місці (наприклад, під кожухом агрегату), контроль повинен проводитися дистанційно. Спосіб контролю [1], реалізований в описуваному пристрої і дає таку можливість, заснований на тому, що п'єзоелектричний перетворювач датчика звернемо, він генерує електричний сигнал при механічному впливі на нього і відчуває механічну деформацію при подачі електричної напруги. В обох випадках рівень реакції на вплив визначається одним і тим самим коефіцієнтом, званим п'єзо-модулем. Інерційність датчика як механічної системи визначається частотою його вільних коливань, яка залежить, перш за все, від властивостей самого датчика, але крім цього, і від механічних властивостей контактуючої з датчиком частини об'єкта. Її називають частотою настановного резонансу (УР). Електрична ж інерційність не пов'язана з механічною та визначається у першому наближенні добутком ємності датчика з кабелем та активним опором його навантаження. Частотний спектр вібрації, що вимірюється датчиком, завжди лежить нижче за частоту УР (інакше результат вимірювання буде недостовірним), займаючи, як правило, область від нуля до 0,2...0,3 її значення. Для підключення до пристрою контролю датчик від'єднують від апаратури, з якою він працює. На нього подають постійну напругу, що заряджає його ємність і деформує п'єзоелемент. Тривалість цієї операції має бути такою, щоб усі перехідні механічні та електричні процеси встигли закінчитися. Після цього відключають джерело напруги від датчика і приєднують до висновків останнього невеликий активний опір на час (зазвичай кілька десятків мікросекунд), достатній для повної розрядки ємності датчика. Механічна деформація п'єзоелемента не може змінюватися з тією ж швидкістю, його повернення в початковий стан відбувається у вигляді загасаючих коливань із частотою УР. П'єзоелемент перетворює ці коливання в електричний сигнал, який реєструють, наприклад, осцилографом, що запам'ятовує. Ознакою нормального стану датчика є незмінність форми та рівня сигналу при неодноразовому контролі. Основні вузли пристрою контролю - два одновібратори, що задають тривалість інтервалів замикання та реєстрації, та два комутатори. Порушення коливань спадом імпульсу при стабільній тривалості замикання дозволяє досягти хорошої повторюваності рівня та форми електричного сигналу, що необхідно для метрологічних операцій. Описуваний варіант приладу дещо складніше. Оскільки осцилограф, що запам'ятовує, дорогий і порівняно рідкісний прилад, процес контролю зроблений циклічним, що дало можливість користуватися звичайним осцилографом. Для більшої достовірності визначення частоти УР введено фільтр, який пригнічує високочастотні перешкоди. Є автономне низьковольтне джерело живлення та вимірювач частоти УР зі світлодіодним індикатором.
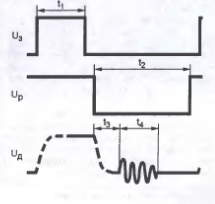
Схема пристрою представлена рис. 1. Мультивібратор на елементах DD1.1 та DD1.2 виробляє імпульси прямокутної форми. З виходу елемента DD1.2 імпульс тривалістю t надходить на керуючий вхід комутатора DA1.3. Під час його дії через замкнутий комутатор на вхід підключеного до роз'єму Х1 датчика ланцюга R14R15HL3 надходить напруга зарядки +12 (крива U3 на рис. 2).
Місткість датчика заряджається до цієї напруги. Світлодіод HL3 призначений для сигналізації про замикання ланцюга датчика. Імпульс, інверсний щодо розглянутого, надходить з виходу елемента DD1.1 через диференціюючу (C2R6) та інтегруючу (C4R11) ланцюга на входи елемента DD1.3. На його виході формується імпульс низького логічного рівня, розташований у паузі між імпульсами зарядки, але має меншу, ніж пауза, тривалість t2. Через диференціюючий ланцюг C6R18 спадаючий перепад цього імпульсу запускає одновібратор на таймері DA6, імпульс якого тривалістю, що визначається параметрами ланцюга R21C7 (інтервал t3 на рис. 2), надходить на керуючий вхід нижнього (за схемою) комутатора мікросхеми DA. При цьому вихід датчика (контакт роз'єму 2 Х3) через комутатор і резистор R1 з'єднується із загальним проводом, розряджаючи ємність датчика. Напруга на датчику (крива U на рис. 12) зменшується до нуля. Спадаючий перепад імпульсу таймера запускає одновібратор на елементах DD6.1 і DD6.3, що генерує імпульс тривалістю t4 (визначається параметрами ланцюга C13R31R53) Через інвертор DD6.2 імпульс надходить на вхід керування верхнім (за схемою) комут тепер коливальний характер, через диференціюючий ланцюг C2R5 подається на вхід підсилювача на ОП DA16, до виходу якого через резистор R4 перемикачем SA25 підключений або конденсатор С3 (режим "Індикація"), або резистор R8 (режим "Діагностика"). У першому випадку утворюється згладжуючий фільтр, у другому - частотонезалежний дільник напруги. Далі сигнал надходить на роз'єм Х27, якого підключають осцилограф або інший реєстратор. На цей же роз'єм виведено імпульс синхронізації, який збігається з часом з початком інтервалу t2. Інші вузли пристрою утворюють вимірювач частоти УР. Сигнал датчика за допомогою підсилювача DA3 та компаратора напруги DA5 перетворюється на серію імпульсів стандартної амплітуди. Коефіцієнт посилення (10 або 20) вибирають перемикачем SA2, стан якого вказують світлодіоди HL1 та HL2. Підрахунок імпульсів з виходу компаратора протягом 1 мс дав значення частоти УР в кілогерцях. Однак такий спосіб виявився неприйнятним, оскільки власні коливання сучасних п'єзодатчиків загасають значно швидше. Тому довелося рахувати імпульси за кілька коротших інтервалів сумарною тривалістю 1 мс. Експеримент показав, що двох інтервалів по 500 мкс цілком достатньо. Рахунок відбувається в такий спосіб. Після натискання на кнопку SB2 "Уст. 0" лічильник DD2.1 встановлюється стан готовності до рахунку, що індикується світлодіодом HL4 "Готовність", а лічильники DD4 і DD5 - в нульовий стан. Тривале натискання на кнопку SB1 "Пуск" відкриває комутатор DA1.1 і тактові імпульси з виходу елемента DD1.2 проходять через відкритий комутатор DA1.2 на лічильник DD2.1. На два входи елемента DD3.2 сигнали надходять з виходів 2 і 4 лічильника, але в його третій вхід - з виходу елемента DD6.2. В результаті високий рівень на виході елемента DD3.3 існує тільки під час робочих тактів, що йдуть після шостого та сьомого імпульсів зарядки (вважаючи з моменту натискання на кнопку SB1). Восьмий імпульс встановлює високий рівень на виході лічильника 8 DD2.1, що через інвертор DD3.1 закриває комутатор DA1.2. Надходження імпульсів на вхід лічильника DD2.1 припиняється, а світлодіод HL4 гасне. Тепер можна відпустити кнопку SB1. Вихід елемента DD3.3 з'єднаний з входом керуючого комутатора DA1.4, включеного між виходом компаратора DA5 і входом лічильника DD4. Індикація стану лічильників DD4 та DD5 здійснюється не зовсім звичайно – за допомогою двох декадних лінійок зі світлодіодів HL5-HL24. Зроблено це зменшення споживаного струму: сумарне споживання всіх названих світлодіодів у разі не перевищує 8 мА. На жаль, ще більш економічні РКІ не підходять через недостатній інтервал робочої температури. Діоди VD1-VD3 введені для зменшення перехідних перешкод. Усі конденсатори у пристрої - керамічні, причому С7 і С13 повинні мати малий ТКЕ, вони можуть бути й іншими, наприклад, слюдяними. Термостабільними (наприклад, С2-31) повинні бути і резистори R21 та R31. Перемикачі - моторні малогабаритні В1561. Однак замість SA3 краще використовувати кнопку контактів на перемикання, наприклад PS580N. Положення контактів при відпущеній кнопці має збігатися з показаним на схемі рис. 1. Тип роз'єму Х1 залежить від того, які датчики передбачається найчастіше перевіряти. Автором використана блочна вилка РС-4ТВ, оскільки основну масу вітчизняних промислових вібродатчиків утворюють п'єзоелектричні акселерометри ABC та АНС з кабельними розетками РС-4ТВ, призначення контактів яких відповідає показаному на схемі рис. 1. Так як від роз'ємного з'єднання в даному випадку вібростійкість не потрібна, доцільно акуратно видалити зовнішнє різьблення на корпусі вилки, що полегшить і прискорить процес підключення та відключення датчиків. Датчики інших типів можна з'єднувати із приладом через відповідні перехідники. Роз'єм Х2 може бути будь-яким, наприклад ОНЦ-ВГ-2-3/16-р. Сигнальний провід у кабелі, що приєднується до нього, повинен бути екранований, провід синхросигналу екранування не вимагає.
Живиться прилад від батареї з п'яти-шести гальванічних елементів типорозміру АА, напруга якої перетворюється на двополярне стабілізоване +/-12 за допомогою перетворювача TMR0522 [2], включеного за схемою, зображеною на рис. 3. При напрузі батареї GB1 7,5 В струм, що споживається, дорівнює відповідно 130 і 145 мА в режимах "Діагностика" і "Індикація". Пристрій зібрано на двох платах, розташованих одна над іншою та з'єднаних стрічковими кабелями. На верхній платі змонтовані органи управління та світлодіоди, а на нижній - решта елементів, крім роз'ємів, які розташовані на окремій кутовій панелі. Корпус підібраний готовий. Так як більшість активних елементів - логічні елементи та ОУ без зовнішньої корекції, налагодження правильно змонтованого пристрою не потребує великих зусиль. Переконавшись, що мультивібратор на елементах DD1.1 DD1.2 генерує симетричні прямокутні імпульси з частотою повторення 30±5 Гц, потрібно перевірити положення і форму імпульсів на виході елемента DD1.3.
За відсутності двопроменевого осцилографа для цього можна використовувати найпростіший суматор, схема якого показана на рис. 4.
Осцилограма сигналу з його виході повинна мати вигляд, зображений на рис. 5, де t1 і t2 - самі інтервали, що у рис. 2. Підбираючи резистори R6 і R11, досягайте, щоб інтервал t2 починався через 0,3...1 мс після закінчення імпульсу заряджання. Його тривалість має бути 5... 10 мс, точне значення несуттєве. Імпульс, що генерується таймером DA6, повинен мати тривалість в інтервалі 20...30 мкс. А ось тривалість імпульсу на виході елемента DD6.2 необхідно встановити підстроювальним резистором R53, що дорівнює 500 мкс з можливо більшою точністю. Від цього залежить похибка вимірювання частоти УР.
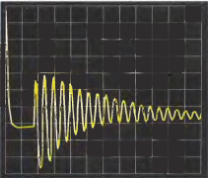
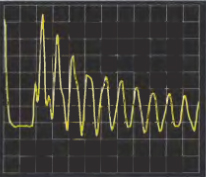
Для подальшого налагодження необхідний п'єзоелектричний датчик (акселерометр) бажано з коефіцієнтом перетворення порядку одиниць мілівольт на метр за секунду за секунду та частотою вільних коливань (вона вище за частоту УР) більше 10 кГц. Підключивши датчик до гнізда Х1, домагаються органами управління осцилографа, приєднаного до гнізда Х2, стійкого зображення на екрані, подібного показаному на рис. 6-8. На них представлені осцилограми, що ілюструють залежність сигналу стану датчика: незакрепленного (рис. 6); встановленого у суворій відповідності до посібника з експлуатації (рис. 7); встановленого, але з ослабленим кріпленням до контрольованої конструкції (рис. 8). Масштаб осцилограм по вертикальній та горизонтальній осях відповідно 50 мВ/поділ. та 50 мкс/поділ. Повторюваність коливань, що збуджуються, характеризують результати вимірювання положення характерних точок осцилограм при десятикратному повторенні збудження. Розкид не перевищив 1,5% і практично збігся з похибкою використаного запам'ятовуючого осцилографа С9-8. Бажано переконатись у відсутності спотворень сигналу на виході ОУ DA3. На практиці вони малоймовірні, розмах загасаючих коливань датчиків різних типів варіює слабо і не перевищує кількох сотень мілівольт. При перевірці роботи тригера Шмітта на компараторі DA5 слід порівняти кількість періодів сигналу на його вході та імпульсів на виході. Пороги спрацьовування тригера встановлюють добіркою резисторів R19 та R23. Перший контроль датчика, особливо призначеного для роботи на об'єкті, що тривало і безупинно працює, бажано провести відразу після його установки. При цьому відразу з'ясується, чи дотримані всі вимоги (допустимі неплощинність і шорсткість посадкової поверхні, момент затягування різьблення, відсутність забруднень та ін.). Їх порушення може настільки знизити частоту УР, що сигнал датчика не правильно відображатиме характер вібрації. В результаті можливе формування несправжньої команди на аварійну зупинку об'єкта. Отриманий результат (відлік частоти УР і положення перемикача SA2) записують, він буде основою оцінки стану датчика при наступних циклах контролю. Помічене відхилення послужить основою більш детального дослідження стану датчика і прийняття рішення необхідність його ремонту чи заміни. Сказане має на увазі, що контроль здійснюється на зупиненому агрегаті. Його температура не обов'язково постійна, а ефект, що використовується, чутливий до її зміни. Як сказано вище, на обох стадіях процесу порушення коливань реакції на вплив визначаються значенням п'єзомодуля - характеристики матеріалу перетворювача, що залежить від ступеня впорядкованості його мікроструктури, що зменшується зі зростанням температури. В даному випадку амплітуда електричного сигналу пропорційна квадрату п'єзомодуля та її температурна залежність відповідно сильніша. За даними проведеного експерименту, сигнал датчика з максимальною робочою температурою 250 °С під час контролю при температурі до 120 °С мав нестабільність в межах ±6 %. Тому бажано, щоб у всіх циклах контролю розкид температури не перевищував 20 °С. У зв'язку з цим експлуатувати пристрій краще разом із приладом, що дозволяє вимірювати температуру датчика. Можливість проведення контролю на працюючому агрегаті залежить від низки причин. Відразу можна сказати, що у разі, якщо рівень вібрації, реєстрований датчиком при нормальному роботі об'єкта, близький до граничного для датчика, верхня межа спектра вібрації наближається до частоти УР, або, нарешті, температура датчика близька до гранично допустимої, контроль неможливий. Прийде проводити його під час планових зупинок агрегату, але і в цьому випадку застосування пристрою дозволить заощадити час і позбутися проведення механічних робіт. Якщо ж перелічені вище обставини менш очевидні, слід провести контроль до пуску і під час роботи об'єкта. Порівнявши отримані результати, можна ухвалити обґрунтоване рішення. Потрібно мати на увазі, що контроль з використанням лише вбудованих індикаторів описаного пристрою реалізує лише частину можливостей. Аналіз спектру чи інших характеристик власних коливань датчика дозволить як більш точно оцінити його стан, а й отримати додаткову інформацію про справності вузла об'єкта, де встановлено датчик. Справа в тому, що верхня межа спектра сигналу датчика, що отримується при його звичайній експлуатації, найчастіше не перевищує 1000 Гц, а іноді й нижче. Невеликі несправності на об'єкті мало впливають характер спектру вібрації. Оскільки при контролі спектр незрівнянно ширше, то, аналізуючи його, вдається помітити навіть дрібні зміни обстановки на об'єкті, зрозуміло, якщо вони відбуваються поблизу датчика. Аналізатор спектру підключають до гнізда Х2 замість осцилографа (або разом з ним) і встановлюють перемикач SA3 в положення "Діагностика". Прилад дозволяє не тільки виявити факт зміни коефіцієнта перетворення датчика, викликаного зміною п'єзомодуля, але і обчислити його нове значення. Найбільш проста методика полягає в порівнянні сигналів при дворазовому контролі: спочатку відразу після установки датчика, коли дійсні дані його недавньої повірки, а потім після закінчення часу, за який очікується зміни параметрів датчика. На обох записах потрібно вибрати однаковим чином N періодів коливань, у кожному їх визначити розмах сигналу (різницю максимального і мінімального значень) і підсумувати отримані значення. Якщо при первинному контролі отримано суму V1, а при повторному - V2, коефіцієнт перетворення в момент проведення повторного контролю дорівнює
де S1 - значення коефіцієнта перетворення, отримане під час перевірки [3]. Його можна використовувати при аналізі результатів вимірювань аж до чергової стандартної повірки. Ще одне застосування пристрій може знайти при виготовленні п'єзоелектричних датчиків на стадіях збирання та регулювання параметрів. На екрані осцилографа можна спостерігати реакцію датчика на операції, що проводяться, настільки ж наочно, що і при налаштуванні фільтрів з генератором коливається частоти. При цьому можна отримувати інформацію не тільки про частоту резонансу, але певною мірою і значення коефіцієнта перетворення. Додамо, що крім датчиків вібрації можливо в ряді випадків контролювати і п'єзодатчики пульсацій тиску, щоправда, контроль буде лише якісним: за принципом "справний-несправний". література 1. Суботін М. Спосіб електричного збудження резонансних коливань п'єзоелектричного акселерометра та пристрій для його здійснення. Патент РФ № 2150708. - Бюлетень винаходів, 2000 № 16.
Автор: М. Суботін, м. Москва; Публікація: radioradar.net
Пастка для комах
01.05.2024 Загроза космічного сміття для магнітного поля Землі
01.05.2024 Застигання сипких речовин
30.04.2024
▪ Стародавні люди труїлися важкими металами ▪ Медичні DC/DC-перетворювачі Mean Well MDS15/20 ▪ Нова мікросхема фероелектричної пам'яті FM25L16 ▪ Мікроконтролер Toshiba TMPM372 із блоком векторних обчислень
▪ Розділ сайту Альтернативні джерела енергії. Добірка статей ▪ стаття Росіяни йдуть! Крилатий вислів ▪ статья Яка гра набула другого життя завдяки кольоровому телебаченню? Детальна відповідь ▪ стаття Наладчик та оператор верстатів з ЧПУ. Типова інструкція з охорони праці ▪ стаття Еквівалент навантаження для УМЗЧ. Енциклопедія радіоелектроніки та електротехніки ▪ стаття Чудо з картоном. Секрет фокусу
Головна сторінка | Бібліотека | Статті | Карта сайту | Відгуки про сайт
www.diagram.com.ua |







 Залишіть свій коментар до цієї статті:
Залишіть свій коментар до цієї статті: