|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ЕНЦИКЛОПЕДІЯ РАДІОЕЛЕКТРОНІКИ ТА ЕЛЕКТРОТЕХНІКИ Напівавтоматичний свердлильний верстат із лазерним покажчиком. Енциклопедія радіоелектроніки та електротехніки
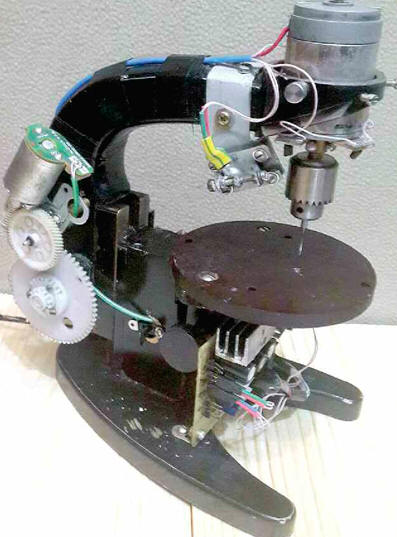
Енциклопедія радіоелектроніки та електротехніки / Технології радіоаматора Для свердління отворів у друкованих платах багато радіоаматорів використовують так звані мікродрилі, що є мініатюрним електродвигуном постійного струму, на валику якого закріплений цанговий затискач свердла. Як інструмент для обробки друкованих плат мікродрилі далекі від ідеалу: потрапити точно в центр майбутнього отвору без кернення досить важко, а досягти руками точного вертикального положення мікродриля практично неможливо. В результаті - неякісний "косий" отвір, центр якого зміщений на іншій стороні плати, а то й поламане свердло (особливо легко зламати дороге твердосплавне свердло, виготовлене з дуже крихкого матеріалу). На ринку пропонується багато варіантів свердлильних верстатів, але всі вони мають ручну подачу свердла та значний люфт, а з електронного забезпечення містять тільки блок живлення і стабілізатор частоти обертання приводного електродвигуна. Саморобний свердлильний верстат, що описується в статті, дозволяє свердлити отвори без попереднього кернення. Логікою його роботи керує мікроконтролер. Працюючи цьому верстаті не ламаються дорогі твердосплавні свердла. Завдяки використанню таких свердлів підвищується якість отворів - вони буквально прорізають отвір, тому після свердління немає необхідності в обробці фольги наждачним папером, який робить тонку фольгу друкарських провідників ще тоншою. Я просвердлив на цьому верстаті більше 1500 отворів одним твердосплавним свердлом (виробництва Німеччини), і він досі не зламався і продовжує свердлити високоякісні отвори. Дешеве свердло зазвичай перестає добре свердлити після 10-20 отворів у фольгованому склотекстоліті, тому доводиться підвищувати частоту обертання свердла і посилювати натискання при свердлінні, в результаті навколо отворів утворюються валики фольги, і після свердління потрібна грунтовна обробка провідників надач. Верстат (його зовнішній вигляд ліворуч, праворуч та ззаду представлений відповідно на рис. 1-3) виготовлений на базі вітчизняного мікроскопа МБІ-3 виробництва об'єднання "ЛОМО". Його роботою керує блок керування (БО), схема якого показана на рис. 4. Виконаний він на основі мікроконтролера ATtiny45 [1]. При подачі живлення БО встановлює верстат у вихідне положення, тобто якщо його рухома частина знаходилася в нижньому або проміжному положенні, вона автоматично піднімається до початкового верхнього положення. Далі оброблювану плату позиціонують під лазерним променем (домагаються того, щоб промінь лазера потрапив у центр отвору), притискають рукою до робочого столика і натискають на педаль. При цьому БУ подає живлення на електродвигун приводу патрона зі свердлом та двигун подачі свердла. Після закінчення свердління двигун подачі свердла повертає верстат у вихідний стан і СУ відключає живлення обох двигунів. Верстат готовий до свердління наступного отвору.
Як лазерний покажчик використаний доопрацьований лазерний модуль, який застосовується в дитячих іграшках. Необхідно сфокусувати коліматор лазера на коротку відстань і обмежити струм живлення, який повинен бути таким, при якому лазер тільки-но починає світити. Це дозволяє отримати більш тонкий промінь (мені вдалося досягти його діаметра 0,2 мм) та знижує випромінювання лазера до безпечного рівня. Вузол кріплення лазера у зборі показано на рис. 5, а креслення його деталей – на рис. 6. Основа 3 і тримач лазера 4 виготовлені з листової сталі товщиною приблизно 1 мм (я використовував стінки корпусу старого CD-ROM). Просвердлив в заготовках необхідні отвори, відгинають у тримача 4 під прямим кутом прямокутні пелюстки для кріплення гвинта з лазерним модулем. Модуль розбирають, залуджують місце паяння його латунного корпусу та дві гайки М3. В отвори відігнутих пелюсток тримача 4 вставляють гвинт 5 (М3х28) і нагвинчують на нього обидві гайки 8 так, щоб вони опинилися між вушками тримача (див. рис. 5). Корпус лазера 2 вставляють під гвинт 5 (між гайками 8) і припаюють до нього гайки так, щоб він впритул прилягав до тримача (це необхідно для безлюфтового переміщення лазера при обертанні гвинта в процесі регулювання).
Далі на виступаючий кінець гвинта 5 нагвинчують ще дві гайки 1 (одна з них буде контргайкою) і затягують їх з таким розрахунком, щоб вуха тримача 4 не давали гвинту 5 зміщуватися вздовж осі. Тепер при обертанні гвинта за годинниковою стрілкою та у зворотному напрямку лазерний модуль переміщатиметься від одного вуха до іншого. Для кріплення утримувача з лазером на підставі 3 до останнього зі зворотного боку припаюють чотири гайки (їх добре видно на рис. 2). Потім відповідні отвори тримача з боку лазера вставляють чотири гвинта 7 (М3х15) з підкладеними під головки шайбами 6 і надягають на них циліндричні пружини стиснення, після чого вгвинчують їх в припаяні до основи гайки. Тепер за допомогою гвинтів можна регулювати положення лазера у різних напрямках. Зібрану конструкцію приміряють до тубусодержателя (верхній частині мікроскопа), загинають навколо нього хвостовик основи тримача лазера і, перенісши гострою рисою контури отворів в основі на тубусодержатель, свердлять в ньому два отвори діаметром 2,5 і глибиною 10 мм і нарізають в них різьблення. На завершення закріплюють основу власника лазера на мікроскопі гвинтами М3. Для подачі свердла використаний електродвигун із черв'ячним редуктором від відеомагнітофона (розбирав апарат давно, тому вказати його назву не можу). Цей механізм (рис. 7) закріплений на тубусодержателе мікроскопа за допомогою трьох металевих стійок з внутрішнім та зовнішнім різьбленням М4 і такого ж числа гвинтів М4. Шестерня закріплена на ручці мікроскопа трьома гвинтами М2,5 з гайками, отвори в обох деталях – наскрізні. Необхідна акуратність при складанні - неспіввісність шестірні та ручки має бути мінімальною.
Швидкість подачі регулюють підстроювальним резистором R11. Електродвигун використаний малопотужний (номінальна напруга - 6, струм - 30 мА), але завдяки черв'ячному редуктору він справляється зі своїм завданням цілком. Конструкція редуктора може бути будь-якою, але має забезпечувати достатнє зусилля, щоб легко повертати ручку мікроскопа. Можна використовувати кроковий електродвигун. У першому проекті я так і зробив, але наявний кроковий двигун мав недостатній момент на валу, а відповідного знайти не вдалося. Якщо у когось виник інтерес щодо використання крокового двигуна, можете звернутися до мене через редакцію. Файли проекту збереглися. У ньому використовувався мікроконтролер ATmega8. Ключ на складовому транзисторі VT5VT6 включає та вимикає електродвигун подачі свердла (його підключають до вилки XP6), транзистор VT2 та реле K1 керують її напрямком: вгору або вниз. Ключ на складовому транзисторі VT3VT4 управляє електродвигуном приводу свердла (його приєднують до вилки ХP3), на мікросхемі DA1 і транзисторі VT1 зібраний стабілізатор частоти його обертання, регулюють частоту резистором R1. Застосовувати стабілізатор частоти обертання складніший, наприклад, як запропонований у [2], немає сенсу, оскільки "прицілюватися" свердлом до центру отвору "на око" не треба. Експерименти із цього приводу проводилися. На мікросхемі DA6 зібрано стабілізатор напруги живлення електродвигуна подачі свердла [3]. Включені послідовно інтегральні стабілізатори DA2 і DA5 призначені для отримання стабілізованої напруги відповідно 12 і 5 В. Перше з них використовується для живлення стабілізаторів струму на мікросхемах DA3, DA4, друге - для живлення мікроконтролера та ключа на транзисторі VT2. Конденсатори С2, С3, С6 - фільтруючі, інші блокувальні. На верстаті застосовано світлодіодне підсвічування. Струм підсвічування та струм лазера стабілізовані: на мікросхемі DA3 зібраний стабілізатор струму лазера, на DA4 - світлодіодів підсвічування. Струм стабілізації розраховують за формулою I = 1,25/R [3] і встановлюють добіркою резисторів R13 та R14. Завдяки стабілізованому струму можливе підключення кількох однотипних світлодіодів підсвічування послідовно. Лазер підключений до вилки ХР4, світлодіоди - до ХР5. Роз'єм ХP7 призначений для підключення програматора. Призначення його контактів відповідає програматору "TRITON+ V5.7T USB" [4]. Програма мікроконтролера розроблялася в інтегрованому середовищі Code VisionAVR V2.05 [5, 6]. До роз'єму ХP2 підключені двопозиційний датчик крайніх верхнього та нижнього положень свердла та кнопка старту свердління. Остання приєднана до контактів 2 і 4, датчик верхнього положення - контактів 1 і 4, нижнього - контактів 3 і 4. Датчик і кнопка - з нормально розімкненими контактами, які при спрацьовуванні замикаються на загальний провід. Як кнопка застосований кінцевий вимикач, змонтований в педалі. Датчик положення використовується від DVD-програвача музичного центру. Спрацьовування датчика в нижньому положенні регулюють таким чином, щоб свердло опускалося не більше ніж на 1 мм нижче плати, що обробляється. Датчиком верхнього положення регулюють максимальний хід свердла, робити його понад 20 мм немає сенсу. Регулювання проводиться переміщенням стійок з пружного дроту 3 (рис. 8), закріплених гвинтами 6 (М3) на скобі 5. Гвинти загвинчують прямокутні пластини з різьбленням через щілину в скобі, яка дозволяє переміщати обмежувачі вгору і вниз. Пластини з різьбленням, а не стандартні гайки, застосовані для того, щоб можна було фіксувати положення стійок у знайденому положенні без застосування будь-якого інструменту для утримання гайок від обертання при затягуванні гвинтів 6. Можна припаяти пластинки до гайок. Скоба закріплена гвинтами 4 на тубусодержателі, а датчик 2 - Г-подібному кронштейні, пригвинченому до основи мікроскопа. Креслення скоби 5 показано на рис. 9, виготовлена вона, як і деталі власника лазера, листової сталі.
Напруга живлення верстата залежить від застосованого електродвигуна приводу свердла, але не повинно бути нижче 14 В. Я використовував двигун переміщення друкуючої головки від струминного принтера Canon з номінальною напругою живлення 24 В. Напруга живлення верстата вибрано із запасом регулювання - 30 В. пристрої в режимі (при свердлінні) - 1,5 А, в момент запуску двигунів він короткочасно зростає до 3 А. Таким чином, блок живлення повинен забезпечити на виході напругу 30 В при споживаному струмі не менше 3 А. Я використовую саморобний лабораторний імпульсний блок живлення з лінійним стабілізатором 0...50 В, 0...10А. Обмеження струму дає плавний пуск двигунів. Деталі блоку управління змонтовані на друкованій платі з однобічно фольгованого склотекстоліту, виготовленої за кресленням, показаним на рис. 10. Малюнок друкованих провідників нанесений методом експозиції зображення з фотонегативу на фольгу заготовки, покриту фоторезистом. Негативний фотошаблон можна надрукувати на струменевому принтері з максимальною якістю.
Постійні резистори R3, R7-R9, R15, керамічні конденсатори C1, C4, C5, C7 (всі типорозміру 0805 для поверхневого монтажу) та мікроконтролер DD1 (в корпусі SOIC8) припаюють безпосередньо до друкованих провідників. Інші резистори - МЛТ-0,25, конденсатори - оксидні імпортні. Транзистори VT1, VT4, VT6 - будь-які серії КТ805, КТ819, VT3, VT5 - ВС337, ВС547, 2N2222, серії КТ315, КТ3102; VT2 - ВС337, 2N2222, будь-який із серій КТ630, КТ815, КТ972 (максимальне значення його колекторного струму має бути не менше робочого струму реле K1). Як ключ VT5VT6 можна застосувати один транзистор серії КТ829 або КТ972, а ключа VT3VT4 - один транзистор КТ827 або КТ829 з будь-яким буквеним індексом. Реле K1 - R40-11D2-5/6, воно замінене будь-яким іншим з напругою спрацьовування 5 В і з двома групами контактів, що перемикають, розрахованих на комутацію струму не менше 1 А. Можна використовувати реле на 12 В, підключивши верхній (за схемою) висновок його обмотки (разом з діодом VD1) до виходу (висновок 3) мікросхеми DA2. Плата управління встановлена під столиком та закріплена гвинтами М3 через куточки до основи мікроскопа (див. рис. 1). Мікросхеми DA2 та DA5 встановлені на тепловідведеннях. Бажано забезпечити тепловідведення і транзистор VT1. Столик виготовлений із текстоліту. Перед переробкою в свердлильний верстат мікроскоп необхідно розібрати, ретельно змити досить в'язке мастило, що утруднює хід тубусодержателя (верхньої частини мікроскопа), і змастити рідким мастилом, наприклад, трансформаторним маслом. Хід верхньої частини має бути максимально легким, плавним і без люфту. Від використання для кріплення свердла класичної цанги було вирішено відмовитись. Застосовано конус Морзе та трикулачковий патрон для свердлів діаметром 0,3-4,5 мм. З'єднання двигуна з патроном має бути без биття. Юстування точки лазера на оброблюваній платі за допомогою гвинтів проводять у наступному порядку: свердлять отвір у пластині фольгованого склотекстоліту, аналогічного тому, з якого виготовлена плата, потім регулювальними гвинтами тримача юстують точку лазера точно на отвір. При цьому треба постаратися не зміщувати пластину. На мій досвід, якщо точка лазера зникла (перестала відбиватися від фольги), то промінь лазера потрапив в отвір і отъюстирован. Товщина склотекстоліту повинна бути такою ж, як і у плати, що виготовляється. Після цього можна бути впевненим, що лазер точно вкаже центр майбутнього отвору. При справних деталях та безпомилковому монтажі БУ налагодження не потребує. Верстат експлуатується понад рік. Під час роботи вільні обидві руки, тому працювати на верстаті зручно. Я не зламав жодного свердла, хоча виготовляю плати досить часто, і я не уявляю, як обходився без цього верстата раніше. Тепер сміливо купую високоякісні дорогі свердла. На свердління 50 отворів йде трохи більше півгодини. Але все ж таки необхідна обережність, є небезпека зламати тендітне свердло при встановленні плати на робочий столик верстата - ненароком стукнути по свердлу. Імовірність поломки свердла при свердлінні невелика, якщо, звичайно, не рухати плату в цей час. Програму мікроконтролера, а також негативний та позитивний фотошаблони у форматі .pdf для перенесення малюнка друкованих провідників на заготовку друкованої плати можна завантажити з ftp://ftp.radio.ru/pub/2015/07/stanok.zip. література
Автор: І. Паршин
Штучна шкіра для емуляції дотиків
15.04.2024 Котячий унітаз Petgugu Global
15.04.2024 Привабливість дбайливих чоловіків
14.04.2024
▪ Сонячна панель-сендвіч для прямої передачі енергії з космосу на земні приймачі ▪ Твердотільний накопичувач Transcend TS128GMTS810 ▪ Три людські мозку зв'язали в мережу ▪ Ігровий хромбук Lenovo IdeaPad Gaming Chromebook
▪ розділ сайту Радіоаматор-конструктор. Добірка статей ▪ стаття Георг Крістоф Ліхтенберг. Знамениті афоризми ▪ статья Який авіаційний пристрій повністю суперечить своїй жаргонній назві? Детальна відповідь ▪ стаття Зопник колючий. Легенди, вирощування, способи застосування ▪ стаття Восіння дерева деревини. Прості рецепти та поради ▪ стаття Доробка стабілізатора напруги LPS-2500RV. Енциклопедія радіоелектроніки та електротехніки
Головна сторінка | Бібліотека | Статті | Карта сайту | Відгуки про сайт
www.diagram.com.ua |










 Залишіть свій коментар до цієї статті:
Залишіть свій коментар до цієї статті: