|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ЕНЦИКЛОПЕДІЯ РАДІОЕЛЕКТРОНІКИ ТА ЕЛЕКТРОТЕХНІКИ Автомат керування сходовим освітленням із датчиком руху. Енциклопедія радіоелектроніки та електротехніки
Енциклопедія радіоелектроніки та електротехніки / Освітлення Пристрої, що управляють освітленням сходів у будинку, не є новими і багаторазово описані в літературі та Інтернеті. Автор пропонує свій варіант на базі готового модуля HC-SR501 із піроелектричним датчиком руху. В Інтернеті достатньо відомостей про його характеристики, причому часто досить суперечливі. Зважаючи на це для отримання правдоподібних відомостей про можливості модуля його характеристики довелося перевіряти ще раз частково дослідним шляхом, частково - шляхом аналізу схеми. У результаті автор дійшов наступним значенням (правда, їх з упевненістю можна віднести лише до одного екземпляра модуля, підданого випробуванням):
Модуль має "нічний" режим роботи, але для цього потрібно встановити фоторезистор. В Інтернеті можна зустріти інформацію про працездатність модуля HC-SR501 при напрузі живлення 20...30 В. Це не відповідає дійсності, тому що на його вході живлення встановлено оксидний конденсатор з номінальною напругою 16 В. Тому розумно живити його напругою не більше 12 В . Застосована у модулі мікросхема формує своєму виході сигнал тривоги у рівнях тривольтної логіки. Але між її виходом і вихідним контактом OUT модуля включений резистор опором 1,5 кОм, тому здатність навантаження модуля дуже невелика. У режимі одиночного спрацьовування після першого виявлення предмета, що рухається в чутливій зоні, логічний рівень напруги на виході модуля стає високим і залишається таким на 5...250 с (час утримання встановлюють при налагодженні), інші можливі в цей період виявлення ігноруються. Після закінчення часу утримання рівень вихідного сигналу повертається до низького, але наступне виявлення стає можливим лише після відновлення властивостей датчика (цей час називають "мертвим"). У режимі циклічного спрацьовування після першого виявлення руху на виході модуля також встановлюється високий рівень на час утримання, проте подальші спрацьовування, що відбулися до закінчення цього часу, починають відлік його заново. В результаті рівень на виході залишається високим, поки тривалість паузи між послідовними виявленнями руху не перевищить час утримання. На фотографіях модуля, які можна знайти в Інтернеті, видно перемичку "MD", переставляючи яку перемикають режими спрацьовування. Однак у модулі, який є у автора, лише зазначено місце для її встановлення, а друковані провідники розведені так, що модуль працює в режимі циклічного спрацьовування.
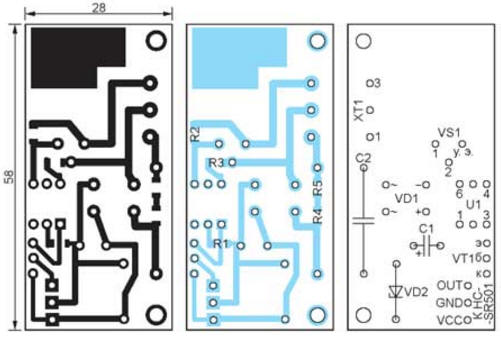
Під "нічним" режимом роботи мається на увазі блокування спрацьовування модуля у світлий час доби. Ця корисна функція дозволяє економити як електроенергію, і ресурс джерел світла. Для її реалізації в отвори, помічені на платі модуля як "RL" (рис. 2), необхідно впаяти фоторезистор. Жодних даних про його характеристики та особливості режиму автору знайти не вдалося, однак установка фоторезистора GL5516 з темновим опором близько 500 ком дала цілком задовільний результат. Спрацьовувати у світлий час доби модуль перестав, тому подальші дослідження у цьому напрямі не проводились.
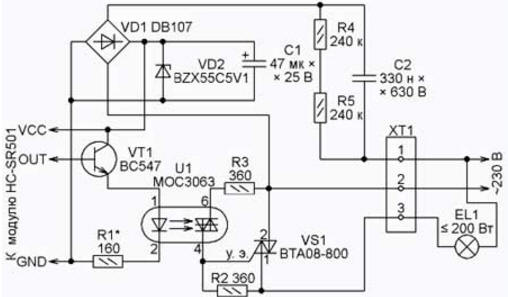
Модуль HC-SR501 значно полегшив створення автомата керування сходовим освітленням. До нього довелося додати лише комутатор джерела світла та вузол живлення. Комутатор було вирішено побудувати на симісторі, що зробило пристрій компактнішим, надійнішим і безшумнішим в порівнянні з електромагнітним реле. Враховуючи, що власне споживання струму таким пристроєм невелике, для вузла живлення було обрано безтрансформаторну схему. Це дозволило зменшити загальні розміри пристрою, важлива схема якого показано на рис. 3. Воно живиться від мережі 230 В, 50 Гц, споживаючи в основному реактивну, що не враховується побутовими лічильниками, потужність близько 5 В-А, і здатне комутувати лампи загальною потужністю до 200 Вт.
Безтрансформаторний вузол живлення (C2, VD1, VD2, с1) формує постійну напругу 5 Ст. Оптроном своєю чергою управляє вихідний сигнал модуля HC-SR1. Але управляти оптроном безпосередньо модуль не може, оскільки мінімальний струм випромінюючого діода оптрона, при якому відкривається його фотосимістор, - 501 мА, а здатність навантаження виходу модуля істотно нижче. Тому випромінюючий діод підключений до модуля через емітерний повторювач транзисторі VT5, який забезпечує необхідне посилення струму. Застосований як VS1 симистор BTA08-800 може комутувати значно потужніший ланцюг, ніж зазначено вище. Але для цього його довелося б встановити на тепловідведення, місця для якого в авторському варіанті конструкції не передбачено через обмежені розміри корпусу. Усі деталі автомата, крім модуля HC-SR501, розміщені на друкованій платі розмірами 58x28 мм (рис. 4), з якою модуль з'єднаний трьома проводами. Плата розрахована на встановлення резисторів для поверхневого монтажу типорозміру 1206. Інші деталі – у звичайному виконанні. Оксидний конденсатор C1 "укладений" на плату і приклеєний до неї. Конденсатор C2 - К73-17 з номінальною постійною напругою 630 або аналогічний імпортний. Триконтактна гвинтова колодка Х11 для підключення мережі живлення та світильника EL1 - DG301 -5.0-03P-12. Весь пристрій, зовнішній вигляд якого показано на рис. 5, поміщено у стандартний корпус G515B розмірами 66x66x30 мм.
Для реалізації "нічного режиму" (якщо він необхідний) зніміть із плати модуля лінзу Френеля (зробити це дуже легко), вставте в отвори "RL" висновки фоторезистора і припаяйте їх, після чого встановіть лінзу Френеля назад. Але впаювати фоторезистор слід тільки після завершення налагодження та регулювання пристрою, інакше проводити ці операції доведеться в темряві, що дуже незручно. Оскільки всі елементи описаного пристрою знаходяться під напругою мережі живлення, працюючи з ним при відкритому корпусі, слід дотримуватися правил електробезпеки. Перше увімкнення пристрою доцільно проводити без модуля HC-SR501, що дозволить уберегти цей модуль від пошкодження у разі неправильної роботи вузла живлення. Увімкнувши пристрій у мережу, передусім перевірте напругу на конденсаторі C1, яка повинна перебувати в межах 5,1±0,3 В. Через 20...30 с відключіть пристрій від мережі та оцініть температуру корпусу стабілітрона VD2. Він може бути трохи теплим. Сильний нагрівання корпусу стабілітрону свідчить про неправильний вибір ємності або несправності конденсатора C2. Далі підключіть до контактів 1 і 3 колодки XT1 лампу розжарювання на 230 В. Увімкніть пристрій у мережу та зачекайте 20...40 з завершення перехідних процесів у модулі (у цей час лампа може іноді запалюватися). Потім внесіть об'єкт, що рухається, в зону чутливості модуля, наприклад, просто змахніть поблизу нього рукою - лампа повинна включитися. Якщо так і сталося, то все працює нормально. Якщо ні, причинами можуть бути: - Недостатній для відкривання фотосимістора оптрона U1 струм його випромінюючого діода. Він має бути не менше 7...8 мА і може бути встановлений добіркою резистора R1;
Закінчивши перевірку, підстроювальними резисторами модуля HC-SR501 встановіть необхідну дальність виявлення (правим, згідно з рис. 2) та час утримання сигналу тривоги (лівим, згідно з рис. 2). Рекомендується регулювати дальність виявлення, встановивши пристрій на місце постійного розташування, щоб врахувати можливий вплив навколишніх предметів на його роботу. Після завершення регулювання в модуль HC-SR501 за потреби встановіть фоторезистор, який забезпечує його роботу в нічному режимі. Файл друкованої плати у форматі Sprint Layout 5.0: ftp://ftp.radio.ru/pub/2017/01/stairs.zip. Автор: О. Савченко
Машина для проріджування квітів у садах
02.05.2024 Удосконалений мікроскоп інфрачервоного діапазону
02.05.2024 Пастка для комах
01.05.2024
▪ Мікроконтролери PIC18F1220, PIC18F1320 ▪ Мережеве сховище TerraMaster F5-221 ▪ Нові технології для збереження свіжості продуктів у холодильнику ▪ Уявна багатозадачність покращує роботу мозку ▪ Розумний стоп-сигнал для велосипедів
▪ Електричні лічильники. Добірка статей ▪ стаття Червона небезпека. Крилатий вислів ▪ стаття Ревень пальчастий. Легенди, вирощування, способи застосування ▪ стаття Порване - ціле! Секрет фокусу
Головна сторінка | Бібліотека | Статті | Карта сайту | Відгуки про сайт
www.diagram.com.ua |




 Залишіть свій коментар до цієї статті:
Залишіть свій коментар до цієї статті: